Download Code
This is a set of Matlab functions to interpolate scattered data with Radial Basis Functions (RBF).

Getting Started
y = RBFinterp(xs, ys, x, RBFtype, R)
interpolates to find y, the values of the function y=f(x) at the points x.
Xs must be a matrix of size [N,Dx], with N the number of data points and Dx the dimension of the points in xs and x.
Ys must be a matrix of size [N,Dy], with N the number of known values at points in Xs, and Dy the dimension of the y values.
X must be a matrix of size [M,Dx], with M the number of query points.
RBFtype specifies the radial basis functions (RBF) to be used.
- The available global support RBFs are:
- ‘R1’ - linear spline
- ‘R3’ - cubic spline
- ‘TPS2’ - thin plate spline
- ‘Q’ - quadric
- ‘MQ’ - multiquadric
- ‘IMQ’ - inverse multiquadric
- ‘IQ’ - inverse quadric
- ‘GS’ - Gauss
| RBF name |
Abbreviation |
 |
| Linear spline |
R1 |
 |
| Cubic splie |
R3 |
 |
| Thin plate spline |
TPS2 |
 |
| Quadric |
Q |
 |
| Multiquadric |
MQ |
 |
| Inverse multiquadric |
IMQ |
 |
| Inverse quadric |
IQ |
 |
| Gauss |
GS |
 |
- The available compact support RBFs are (see Wendland H., Konstruktion und Untersuchung radialer Basisfunktionen mit kompaktem Träger. PhD thesis, Göttingen, Georg-August-Universität zu Göttingen, Diss, 1996):
- ‘CP_C0’
- ‘CP_C2’
- ‘CP_C4’
- ‘CP_C6’
- ‘CTPS_C0’
- ‘CTPS_C1’
- ‘CTPS_C2a’
- ‘CTPS_C2b’
Compact support functions have the form
R is either the support radius for the compact support RBFs or a parameter to make the distance values dimensionless for the global support RBFs.
[fPar, M] = RBFparam(xs, ys, RBFtype, R)
returns the weights in the RBF summation and the polynomial coefficients in a column vector fPar by solving a linear system
[y] = RBFeval(xs, x, fPar, RBFtype, R)
returns the values of the interpolation weighted function at points x by performing the matrix-vector product
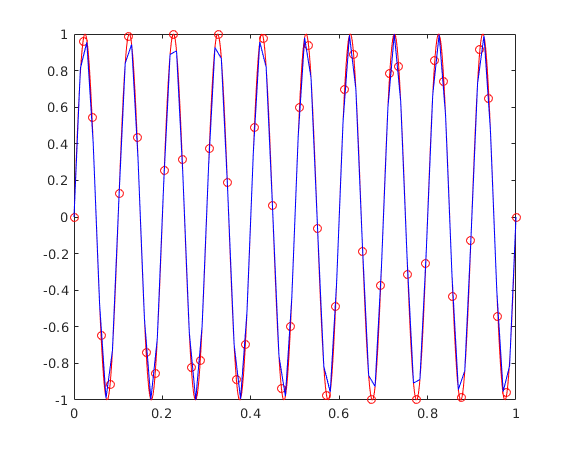
Running the example
An example case can be run just by typing in the Matlab command line
test
References
- Beckert, Armin and Wendland, Holger. Multivariate interpolation for fluid-structure-interaction problems using radial basis functions. Aerospace Science and Technology, 5 (2), p. 125-134, 2001.
- Wendland, Holger. Konstruktion und Untersuchung radialer Basisfunktionen mit kompaktem Träger}. PhD thesis, Göttingen, Georg-August-Universität zu Göttingen, Diss, 1996.
- De Boer, A and Van der Schoot, MS and Bijl, Hester. Mesh deformation based on radial basis function interpolation. Computers & structures, 85 (11-14), p. 784-795, 2007.
- Biancolini, Marco Evangelos. Fast Radial Basis Functions for Engineering Applications. Springer, 2018.